ACCORDO DI PROGRAMMA QUADRO MIUR-ACT-REGIONE TOSCANA DGRT 758/2013 e s.m.i. PAR FAS 2007-2013 - Linea d'azione 1.1 BANDO FAR-FAS 2014
ACCORDO DI PROGRAMMA QUADRO MIUR-ACT-REGIONE TOSCANA DGRT 758/2013 e s.m.i. PAR FAS 2007-2013 - Linea d'azione 1.1 BANDO FAR-FAS 2014 Ecosistema robotico
Ecosistema robotico
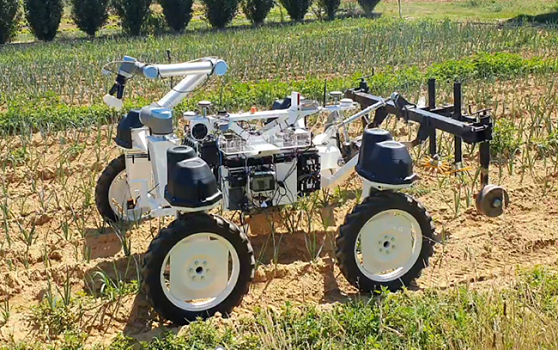
AgroBot è un robot agricolo “originale” SMASH, un mezzo a guida autonoma in grado di muoversi in differenti ambienti e colture per eseguire differenti tipi di operazioni. Monta a bordo i moduli funzionali, ovvero i sistemi di monitoraggio (sensori, telecamere, ecc… ) per l’acquisizione di dati e informazioni, ma anche gli attuatori (manipolatori, erogatori a rateo variabile, sistemi di diserbo meccanico, dispositivi NTP di trattamento aria/acqua) che entreranno in azione anche in funzione per svolgere numerosi compiti nell'ottica di una agricoltura di precisione. A tale scopo opera in collaborazione ed in sinergia con gli altri robot dell'ecosistema robotico.
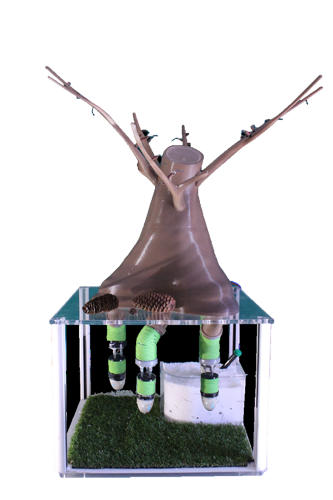
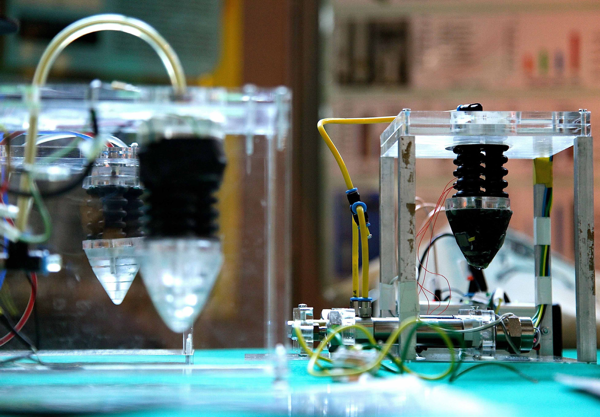
Cosa fa: gli attuatori “originali” SMASH
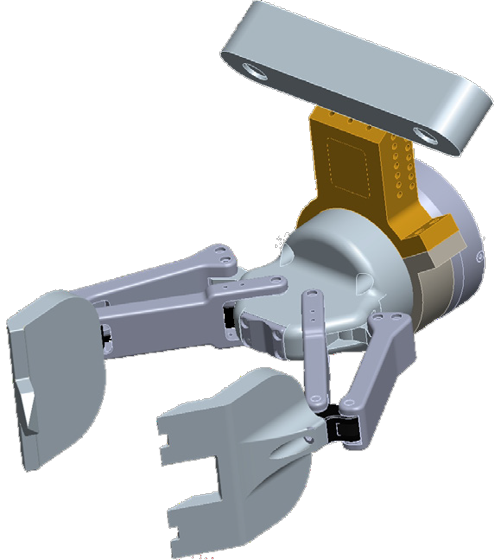
Sono gli end-effectors collegati ai bracci robotici e/o direttamente al corpo del mezzo agricolo AgroBot)
|
 |
Avanzati sistemi di navigazione autonoma
 |
 |
| Agrobot versione "vigna" | Agrobot versione "ortive" |
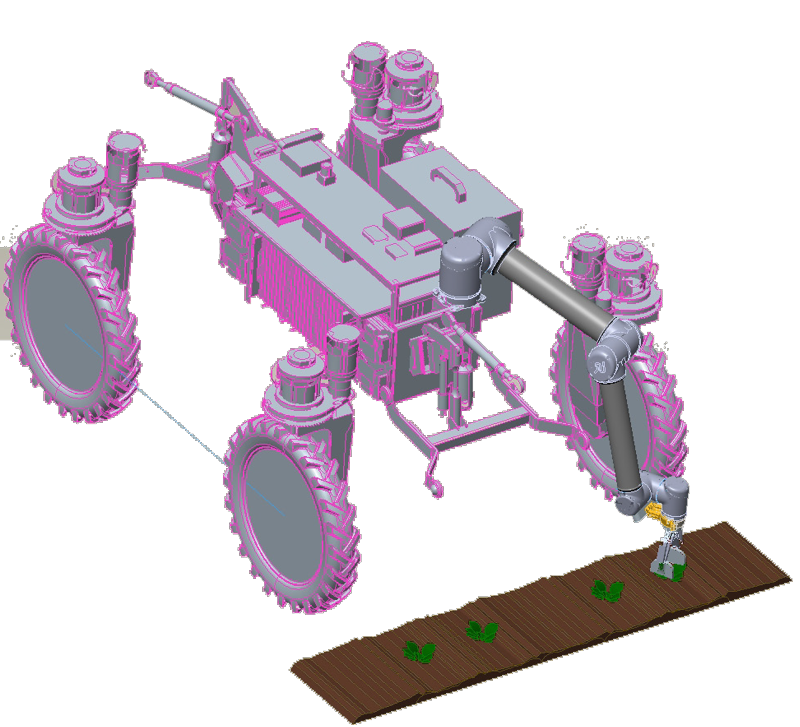
AGROBOT versione ORTIVE
All’interno del campo di spinacio l’Agrobot effettua invece delle operazioni di campionamento geolocalizzato delle piante oltre a provvedere alla rimozione di eventuali rifiuti. I campioni raccolti sono successivamente analizzati nell'Ancillarybot.
La raccolta avviene mediante un braccio robotico a 6 gradi di libertà che, grazie al sistema di visione montato alla sua estremità, localizza e riconosce l’oggetto da prelevare. Le traiettorie del robot sono ottimizzate per evitare la collisione con la base mobili ed eventuali tool ad essa collegate. Una pinza elettrica dotata di due dita provvede poi all’afferraggio e al deposito in opportuno contenitore montato a bordo dell’Agrobot. I tre sistemi (manipolatore, pinza e camera), comunicano attraverso protocolli di comunicazione TCP IP. Il veicolo è equipaggiato con apposite attrezzature posteriori adibite alla rimozione meccanica delle specie infestanti, che avviene contemporaneamente alle attività sopracitate.
 |
 |
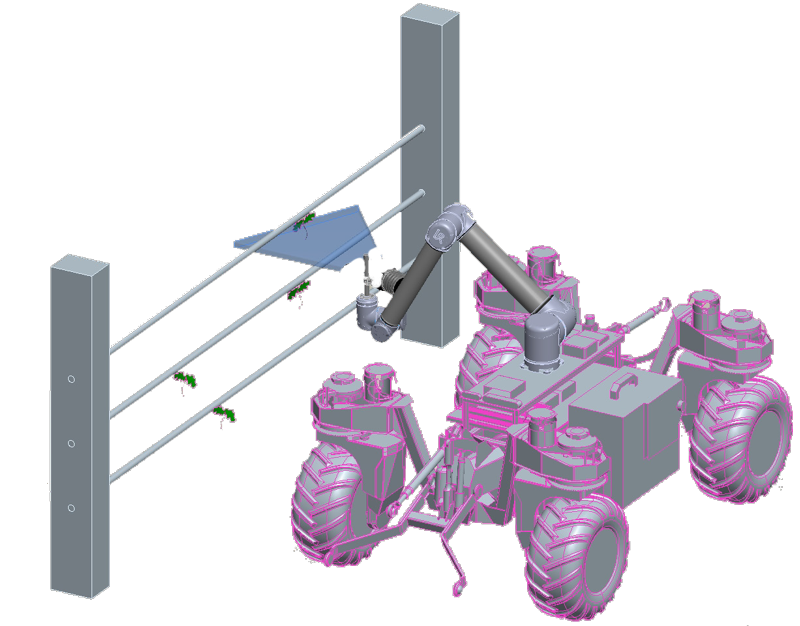
AGROBOT versione VIGNA
All’interno del vigneto una localizzazione avanzata con laser, GPS e telecamere è utilizzata per consentire al robot di operare in massima sicurezza per le piante e per gli operatori. Il veicolo riconosce inoltre la presenza di eventuali malattie per le quali può effettuare dei trattamenti mirati. Nello specifico, il laser scanner, integrato sul lato frontale dell’Agrobot viene utilizzato per valutare ed eventualmente correggere la posizione e l’orientamento dell’Agrobot all’interno della vigna. Al contempo, il sensore laser fornisce una ridondanza relativa al riconoscimento di ostacoli così da evitare collisioni con gli umani o con oggetti non facilmente superabili dall’Agrobot.
 |
 |